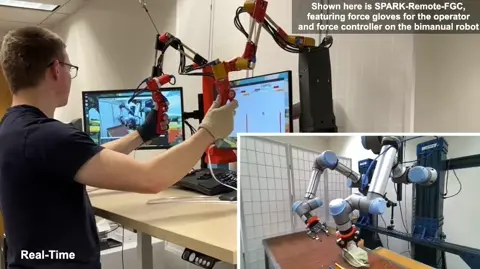
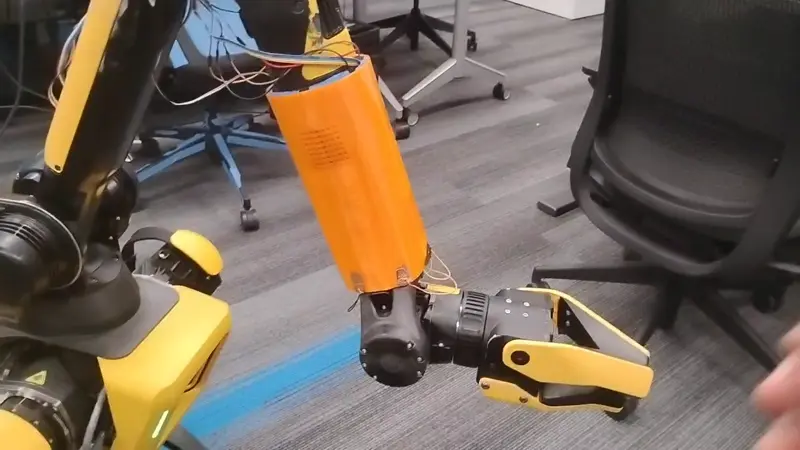
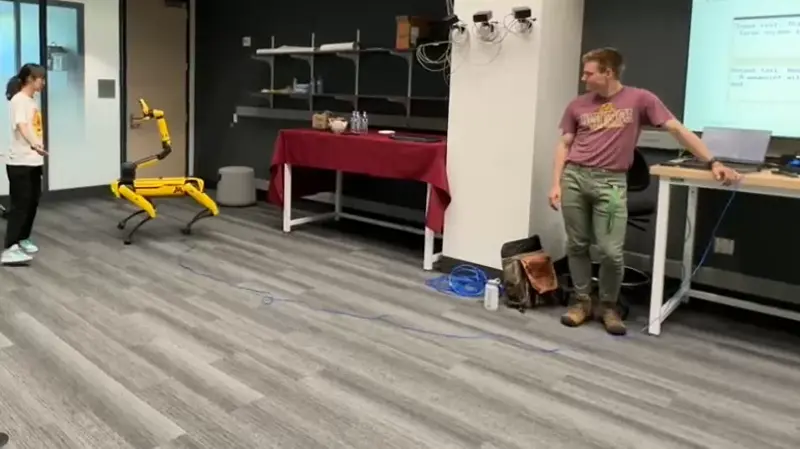
work SPARK Remote SPARK-Remote - A Cost-Effective System for Remote Bimanual Robot Teleoperation. Tactile Skin A low-cost, flexible, and easy-to-fabricate tactile skin for robots using piezoresistive materials. Zero-Shot Robotic Manipulation We predict video sequences of robot interactions using pre-trained video diffusion models and use these predictions to plan actions. SpotNLP A Natural Language Interface for Boston Dynamics Spot